|
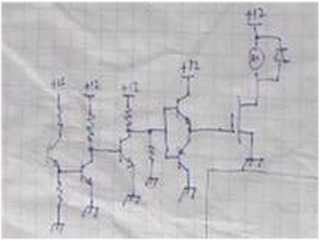
| Power board -- original schematic |
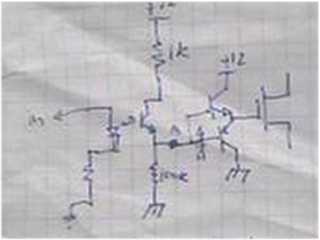
Now, in Halo, I used the output of the phototransistor in the optoisolator to drive the base of this push-pull directly. The collector of the phototransistor is attached to 12V through a 1K resistor; the emitter is attached directly to the push-pull bases and to ground through a 100K resistor.
Turn on worked adequately -- there's just about 12mA (12V/1Kohm) driving the bases of push-pull, so the Ic flow on the top NPN can be as high as 600mA (4401 beta is at least 50). Of course, as Ve gets higher, Vb gets higher too, so the Ib current flow drops, dropping Ic as well.
However, turn off is another story. The capacitance of the gate (about 3000pF) and the high resistance on the ground path (100Kohm) give an RC time constant of 300 microseconds. The switching period is only 256 microseconds! So the gate voltage only sags down a small amount before the next pulse comes in and switches it on hard. For any non-zero duty cycle, the FET mostly stays switched on.
If I try to fix it by using a smaller resistor on the ground path, the voltage-divider effect of the pull-up and pull-down resistors on the phototransistor becomes more pronounced, and the base voltage on the push-pull pair can't get high enough to turn the FET fully on. If I try to fix that by decreasing the collector resistor on the phototransistor, I start to exceed its maximum Ic.